









ESPACIO VECTORIAL
Historia
Los espacios vectoriales se derivan de la geometría afín, a través de la introducción de coordenadas en el plano o el espacio tridimensional. Alrededor de 1636, los matemáticos franceses Descartes y Fermat fundaron las bases de la geometría analítica mediante la vinculación de las soluciones de una ecuación con dos variables a la determinación de una curva plana.1 Para lograr una solución geométrica sin usar coordenadas, Bernhard Bolzano introdujo en 1804 ciertas operaciones sobre puntos, líneas y planos, que son predecesores de los vectores.2 Este trabajo hizo uso del concepto de coordenadas baricéntricas de August Ferdinand Möbius de 1827.3 El origen de la definición de los vectores es la definición de Giusto Bellavitis de bipoint, que es un segmento orientado, uno de cuyos extremos es el origen y el otro un objetivo. Los vectores se reconsideraron con la presentaciónde los números complejos de Argand y Hamilton y la creación de los cuaterniones por este último (Hamilton fue además el que inventó el nombre de vector).4 Son elementos de R2 y R4; el tratamiento mediante combinaciones lineales se remonta a Laguerre en 1867, quien también definió los sistemas de ecuaciones lineales.
En 1857, Cayley introdujo la notación matricial, que permite una armonización y simplificación de los aplicaciones lineales. Casi al mismo tiempo, Grassmann estudió el cálculo baricéntrico iniciado por Möbius. Previó conjuntos de objetos abstractos dotados de operaciones.5 En su trabajo, los conceptos de independencia lineal y dimensión, así como de producto escalar están presentes. En realidad el trabajo de Grassmann de 1844 supera el marco de los espacios vectoriales, ya que teniendo en cuenta la multiplicación, también, lo llevó a lo que hoy en día se llaman álgebras. El matemático italiano Peano dio la primera definición moderna de espacios vectoriales y aplicaciones lineales en 1888.
Un desarrollo importante de los espacios vectoriales se debe a la construcción de los espacios de funciones por Henri Lebesgue. Esto más tarde fue formalizado por Banach en su tesis doctoral de 19207 y por Hilbert. En este momento, el álgebra y el nuevo campo del análisis funcional empezaron a interactuar, en particular con conceptos clave tales como los espacios de funciones p-integrables y los espacios de Hilbert. También en este tiempo, los primeros estudios sobre espacios vectoriales de infinitas dimensiones se realizaron.
DEFINICIÓN
Un espacio vectorial (o espacio lineal) es el objeto básico de estudio en la rama de la matemática llamada álgebra lineal. A los elementos de los espacios vectoriales se les llama vectores. Sobre los vectores pueden realizarse dos operaciones: la multiplicación por escalares y la adición (una asociación entre un par de objetos). Estas dos operaciones se tienen que ceñir a un conjunto de axiomas que generalizan las propiedades comunes de las tuplas de números reales así como de los vectores en el espacio euclídeo. Un concepto importante es el de dimensión. Históricamente, las primeras ideas que condujeron a los espacios vectoriales modernos se remontan al siglo XVII: geometría analítica, matrices y sistemas de ecuaciones lineales. La primera formulación moderna y axiomática se debe a Giuseppe Peano, a finales del siglo XIX. Los siguientes avances en la teoría de espacios vectoriales provienen del análisis funcional, principalmente de los espacios de funciones. Los problemas de Análisis funcional requerían resolver problemas sobre la convergencia. Esto se hizo dotando a los espacios vectoriales de una adecuada topología, permitiendo tener en cuenta cuestiones de proximidad y continuidad. Estos espacios vectoriales topológicos, en particular los espacios de Banach y los espacios de Hilbert tienen una teoría más rica y complicada.
Los espacios vectoriales tienen aplicaciones en otras ramas de la matemática, la ciencia y la ingeniería. Se utilizan en métodos como las series de Fourier, que se utiliza en las rutinas modernas de compresión de imágenes y sonido, o proporcionan el marco para resolver ecuaciones en derivadas parciales. Además, los espacios vectoriales proporcionan una forma abstracta libre de coordenadas de tratar con objetos geométricos y físicos, tales como tensores, que a su vez permiten estudiar las propiedades locales de variedades mediante técnicas de linealización.
El plano R2, consistente en los pares (x, y) de números reales, es el típico ejemplo de espacio vectorial: cualquiera dos pares de números reales pueden sumarse,
(x1, y1) + (x2, y2) = (x1 + x2, y1 + y2),
y cualquier par (x, y) puede escalarse, multiplicarse por un número real s, para obtener otro vector (sx, sy).
Existe además un vector, el (0,0), llamado vector nulo que cumple que al sumarse con cualquier otro vector no lo altera. Todo vector, por ejemplo el (1, 0), tiene su opuesto, el (−1, 0), que sumados dan como resultante el vector nulo (0, 0).
La noción de espacio vectorial es una generalización de esta idea. Es más general de varias maneras: en primer lugar, en lugar de los números reales otros cuerpos, como los números complejos o los cuerpos finitos, se permiten. En segundo lugar, la dimensión del espacio, que es de dos en el ejemplo anterior, puede ser arbitraria, incluso infinita. Otro punto de vista conceptual importante es que los elementos de los espacios vectoriales no suelen estar expresados como combinaciones lineales de un conjunto de vectores, es decir, no hay preferencia de representar el vector (x, y ) como
(x, y) = x • (1, 0) + y • (0, 1)
o como
(x, y) = (−1/3•x + 2/3•y) • (−1, 1) + (1/3•x + 1/3•y) • (2, 1)
DEFINICIÓN DE ESPACIO VECTORIAL
Un espacio vectorial sobre un cuerpo K (como el cuerpo de los números reales o los números complejos) es un conjunto V no vacío dotado de dos operaciones internas:
tal que:
• tenga la propiedad conmutativa, es decir
• tenga la propiedad asociativa, es decir
• tenga elemento neutro 0, es decir
• tenga elemento opuesto, es decir
tal que: • • • • Los elementos de K se llaman escalares.
Los elementos de V se llaman vectores.
DEFINICIÓN DE SUBESPACIO VECTORIAL
Sea V un espacio vectorial sobre K y no vacío,U es un subespacio vectorial de V si:
• • CONSECUENCIAS
U hereda las operaciones de V como operaciones internas y como consecuencia tenemos que U es un espacio vectorial sobre K. OBSERVACIÓN Con esta definición puede comprobarse que R2, con la suma y producto vistos arriba, es por tanto un espacio vectorial. Comprobar los axiomas se reduce a verificar identidades sencillas como (x, y) + (0, 0) = (x, y), i.e. la suma de un vector nulo (0, 0) con otro vector produce el mismo vector. La propiedad distributiva lleva a (a + b) • (x, y) = a • (x, y) + b • (x, y). NOTAS Y DEFINICIÓN ALTERNATIVA El requisito de que la suma de vectores y la multiplicación por un escalar sean operaciones binarias incluye (por la definición de las operaciones binarias) una propiedad llamada cerradura, es decir, u + v y a v se encuentran en V para todos a, u y v. Algunos autores optan por mencionar estas propiedades como axiomas separados. Las primeras cuatro propiedades hacen referencia a la suma de vectores y se resumen diciendo que el espacio vectorial es un grupo conmutativo con la suma. El resto de propiedades son equivalentes a la existencia de un homomorfismo de anillos f del cuerpo en el anillo de endoformismos del grupo de vectores. Luego, la multiplicación por un escalar a v se define como (f(a))(v). Esto puede ser visto como el punto de partida de la definición de un espacio vectorial sin referirse al cuerpo. En particular, para cualquier a de , se llama homotecia de razón a al morfismo de . Con estas premisas tenemos la siguiente DEFINICIÓN Se dice que es un espacio vectorial sobre si y sólo si se tiene
, +, *
es un morfismo de anillos. CONSECUENCIAS DE ESTA DEFINICIÓN • El hecho que (V, + ) sea un grupo abeliano resume en sí mismo los axiomas de la suma vectorial. • El que ha sea homotecia da cuenta del axioma 4 del producto por escalares ya que es lineal. • El que f sea un morfismo de anillos significa que o f(a + b) = f(a) + f(b), es decir que ha + b = ha + hb, ó sea (axioma 10) o , es decir , ó sea (axioma 7) o f(1) = I, ó sea h1 = I, donde 1 es el neutro de (K,.) e I es la identidad, es decir la aplicación de V. La identidad es obviamente el neutro de End V. Esto se escribe para cuaquier vector . (axioma 8 ) • Se podría añadir , la aplicación nula de V, pero es una consecuencia de la tercera premisa. • El último punto (f(1) = I) equivale a afirmar que f no es la aplicación nula. PROPIEDADES DEL ESPACIO VECTORIAL Hay una serie de propiedades que se demuestran fácilmente a partir de los axiomas del espacio vectorial. Algunas de ellas se derivan de la teoría elemental de grupos, aplicada al grupo (aditivo) de vectores: por ejemplo, el vector nulo 0 Є V, y el opuesto -v de un vector v son únicos. Otras propiedades se pueden derivar de la propiedad distributiva, por ejemplo, la multiplicación por el escalar cero da el vector nulo y ningún otro escalar multiplicado por un vector da cero: Propiedad Significado Unicidad del vector nulo Unicidad del opuesto de un vector Producto por el escalar cero 0 v = 0. El 0 es el único escalar que cumple esta propiedad. Producto de un escalar por el vector nulo a 0 = 0 Opuesto del producto de un vector por un escalar - (a v) = (-a) v = a (-v) EJEMPLOS ESPACIOS DE COORDENADAS Y DE FUNCIONES El primer ejemplo de un espacio vectorial sobre un cuerpo K es el propio cuerpo, equipado con la suma y multiplicación definida en el cuerpo. Esto se generaliza por el espacio vectorial conocido como el espacio de coordenadas representado generalmente como Kn, donde n es un entero. Sus elementos son n-tuplas (a1, a2, …, an), donde los ai son elementos de K. Las sucesiones infinitas de coordenadas, y, más generalmente, las funciones de cualquier conjunto fijo Ω en un cuerpo K también forman espacios vectoriales, mediante la suma y la multiplicación escalar puntual, es decir, la suma de dos funciones de f y g viene dada por (f + g)(w) = f(w) + g(w) y de igual modo para la multiplicación. Tales espacios de funciones se producen en muchas situaciones geométricas, cuando Ω es la recta real, un intervalo, o algún subconjunto de Rn. Muchos conceptos en topología y análisis, tales como continuidad, integrabilidad o diferenciabilidad tienen un buen comportamiento respecto a la linealidad, es decir, sumas y múltiplos por un escalar de funciones que posean una determinada propiedad seguirán teniéndola. Por lo tanto, el conjunto de tales funciones son espacios vectoriales. Estos espacios se estudian con más detalle utilizando los métodos de análisis funcional, véase más abajo. Las desigualdades algebraicas también producen espacios vectoriales: el espacio vectorial K[x] formado por funciones polinómicas, i.e. f (x) = rnxn + rn−1xn−1 + … + r1x + r0,donde los coeficientes rn, …, r0 se encuentran en K. Las series de potencias son similares, salvo que se permiten infinitos términos. ECUACIONES LINEALES Los sistemas de ecuaciones lineales homogéneas están estrechamente vinculados a los espacios vectoriales. Por ejemplo, las soluciones de a + 3b + c = 0 4a + 2b + 2c = 0 vienen dadas por tripletas de la forma a, b = a/2, y c = −5a/2 para un a arbitrario. Forman un espacio vectorial: las sumas y múltiplos de esas tripletas sigue cumpliendo las ecuaciones, por lo que son soluciones, también. Las matrices se pueden utilizar para condensar múltiples ecuaciones lineales en una sola ecuación, con el ejemplo anterior, Ax = 0, donde A es la matriz
,
, x es el vector (a, b, c), y 0 = (0, 0) es el vector nulo. De forma similar, las soluciones de ecuaciones diferenciales lineales homogéneas forman espacios vectoriales. Por ejemplo, las soluciones de la ecuación f ’‘(x) + 2f ’(x) + f (x) = 0 son de la forma f (x) = a • e−x + bx • e−x, donde a y b son constantes arbitrarias, y e = 2.718…. TEORÍA DE NÚMEROS ALGEBRAICOS Una situación común en la teoría de números algebraicos es un cuerpo K que contiene un subcuerpo E. Por las operaciones de multiplicación y adición de K, K se convierte en un E-espacio vectorial, es decir, una extensión de E. Por ejemplo, los números complejos son un espacio vectorial sobre R. Otro ejemplo es Q(z), el cuerpo más pequeño que contiene los números racionales y algún número complejo z. APLICACIONES LINEALES Y MATRICES Como ocurre con muchas entidades algebraicas, la relación entre dos espacios vectoriales se expresa por las aplicaciones entre ellos. En el contexto de los espacios vectoriales, el concepto correspondiente se denomina aplicación lineal o transformación lineal. Se tratan de funciones f : V → W que son compatibles con la estructura relevante, i.e., preservan la suma de vectores y el producto por un escalar: f(v + w) = f(v) + f(w) y f(a • v) = a • f(v). Un isomorfismo es aquella aplicación lineal f : V → W para la cual existe una inversa g : W → V. Si existe un isomorfismo entre V y W, los dos espacios se dice que son isomorfos, siendo esencialmente idénticos como espacios vectoriales, ya que a cualquier identidades en V le corresponde, a través de f, otra similar en W, y viceversa a través de g. Dados dos espacios vectoriales V y W, las aplicaciones lineales de V en W forman un espacio vectorial representado como Hom F?(V, W) o como L(V, W). Una vez se elige una base de V, las aplicaciones lineales f : V → W están completamente determinadas por las imágenes de los vectores de la base, ya que cualquier elemento de V se expresa de forma única como una combinación lineal de éstos. Si los dos espacios tienen la misma dimensión se puede elegir una biyección entre dos bases fijas de V y W. La aplicación que aplica cualquier elemento de la base de V en el correspondiente elemento de la base deW, es, por su propia definición, un isomorfismo. Luego todo espacio vectorial está completamente determinado (salvo isomorfismos) por su dimensión, un simple número. En particular, cualquier espacio vectorial de dimensión n sobre F es isomorfo a Fn. MATRICES
Una matriz típica. Las matrices son un concepto útil para representar las aplicaciones lineales. Se escriben como una tabla rectangular de escalares, es decir, elementos de algún cuerpo K. Cualquier matriz m-por-n A da lugar a una aplicación lineal de Kn a Km, por la siguiente fórmula:
,
o mediante el producto de la matriz A con el vector de coordenadas x: x ↦ Ax. Además, después de la elección de bases de V y W, cualquier aplicación lineal f : V → W se representa de forma única por una matriz a través de esta fórmula.
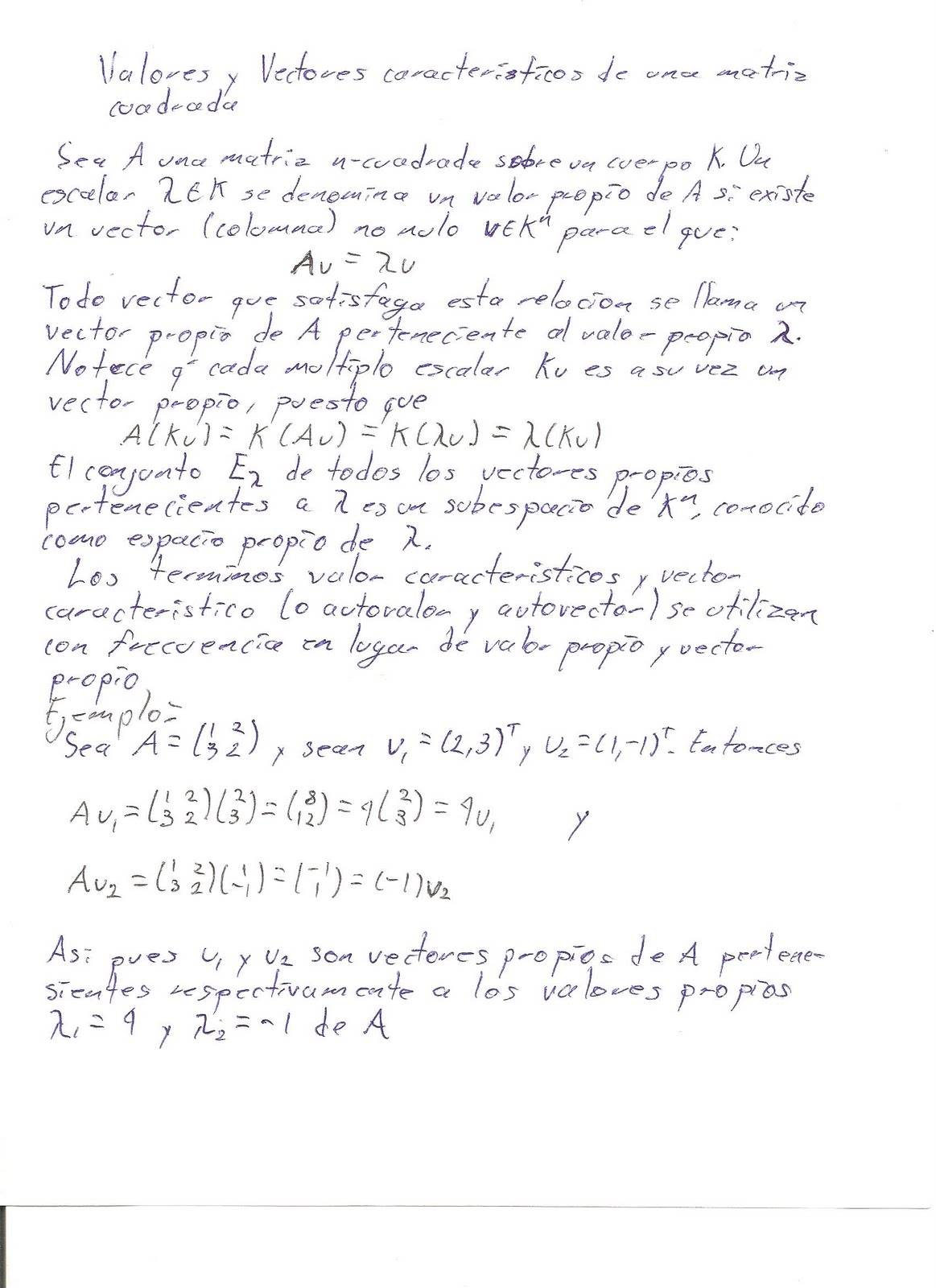
El volumen de este paralelepípedo es el valor absoluto del determinante de la matriz 3-por-3 formada por los vectores r1, r2, y r3. El determinante det (A) de una matriz cuadrada A es un escalar que nos dice si la correspondiente aplicación lineal es o no un isomorfismo: para serlo la condición necesaria y suficiente es que el determinante no sea cero. VECTORES Y VALORES PROPIOS Un caso especialmente importante de aplicación lineal son los endomorfismos, es decir, aplicaciones f : V → V. En este caso, los vectores v pueden compararse con sus imágenes por f, f(v). Cualquier vector v satisfaciendo f(v) = λ • v, donde λ es un escalar, se dice que es un vector propio de f con valor propio λ.nb 1 Equivalentemente, v es un elemento del núcleo de la diferencia f − λ • Id (la aplicación identidad V → V). En el caso finito-dimensional, esto puede ser reformulado utilizando determinantes como: f tiene el valor propio λ sii det (f − λ • Id) = 0. Al desarrollar el determinante, la expresión del lado izquierdo resulta ser una función polinómica en λ, llamada polinomio característico de f. Si el cuerpo F es lo suficientemente grande como para contener un cero de este polinomio (que siempre ocurrirá si F es algebraicamente cerrado, por ejemplo C) la aplicación lineal tendrá al menos un vector propio. El espacio vectorial V puede o no tener una base formada por vectores propios. Este fenómeno se rige por la forma canónica de Jordan del endomorfismo. El teorema espectral describe el caso infinito-dimensional; para lograr este objetivo, son necesarios los mecanismos de análisis funcionaL.
La resolución de sistemas de ecuaciones mediante determinantes
Hasta este momento has visto tres métodos para resolver ecuaciones lineales en dos variables: gráfico, por sustitución y eliminación. A continuación un método que te puede ser de utilidad para el mismo tipo de ejercicio que los métodos anteriores.
La regla de Cramer
Para poder aplicar la regla de Cramer es buena idea comenzar con una explicación sobre cómo calcular los determinantes.
Determinantes 2 x 2
Si a,b,c y d son cuatro números reales, a la expresión
D = se le llama un determinante 2 x 2.
Su valor se determina con la expresión ad - bc. Es decir, multiplicamos en forma cruzada y restamos los productos. Es importante que lleves a cabo la multiplicación como se ilustra.
D = = ad - bc
Veamos un ejemplo:
¿Cuál es el determinante para la matriz siguiente ?
Observa el procedimiento para hallarel determinante.
= (3)(1) - (6)(−2) = 15
Resumes este proceso de la siguiente forma: primero se multiplican los números que quedan en la diagonal de izquierda arriba a derecha abajo. Luego a este resultado se le resta el producto de los números en la diagonal de izquierda abajo a derecha arriba.
La regla de Cramer es un proceso que te ayuda a resolver sistemas de ecuaciones lineales que tengan la misma cantidad de ecuaciones y variables. Es un método que aplica los determinantes.
Veamos un ejemplo con todos sus pasos.
Resuelve el siguiente sistema de ecuaciones:
3x - 2y = 4
6x + y = 13
Hallas primero el determinante de los coeficientes de las variables. Lo llamas el determinante principal y lo nombras con una D.
D = = (3)(1) - (6)(−2) = 15
Observas que el determinante de la matriz de coeficientes nos dio 15. Continúas con el proceso. Observa el procedimiento para hallar el valor del determinante para la variable x.
Remplazas la columna de coeficientes de la variable x con los valores de las constantes. Observa a continuación el proceso:
Dx= = (4) (1) - (13) (−2) = 4 + 26 = 30
Para hallar el valor de x, divides el valor determinado Dx por el determinante principal D. Es decir, calculas
Ahora observa cómo hallas el valor de y.
Dy se calcula con el determinante
Dy = = (3)(13) - (6)(4) = 39 - 24 = 15. Fíjate que en este determinante cambias la segunda columna por las constantes.
Para hallar el valor de y divides el valor hallado para Dy por el determinante principal D. Es decir, calculas y = = = 1 .
Concluyes que la solución del sistema es (2,1). Esto significa que las dos rectas representadas por las ecuaciones originales se intersecan en el punto con coordenadas (2,1). Recuerda que si el sistema resulta en rectas que se intersecan lo llamas consistente.
Estudia ahora la forma general de la Regla de Cramer para dos ecuaciones con dos variables:
La solución para el sistema de ecuaciones
ax + by = s cx + dy = t
esta dada por
x = , y =
siempre que lo siguiente ocurra
D = = ad - bc ¹ 0
Finalmente, con la regla de Cramer se concluye que si
D ¹ 0, entonces
x = , y = .
Por si tienes alguna duda sobre el proceso, es importante que estudies el ejemplo 1 de la página 710 de tu texto y resuelvas los siguientes sistemas aplicando este método.
Resuelve:
1. 1. −3x + 2y = −6
4x - 5y = 8
2. 2. 7x - 2y = 11
x + 3y = −5
(Respuestas)
Práctica adicional: Página 712 del texto, ejercicios impares 1 al 11.
La Regla de Cramer aplicada a determinantes de matrices 3 x 3
Observa un sistema de ecuaciones lineales que consta de tres ecuaciones lineales y las variables x, y, z.
2x + y - z = 3 -x +2y +4z = −3 x - 2y - 3z = 4
Primero hallamos el determinante de los coeficientes de las variables, que es
D =
Una forma de hallar este determinante se presenta a continuación:
D = =
=[(2)(2)(−3) + (1)(4)(1) +(−1)(−1)(−2)] - [ (1)(2)(−1)+(−2)(4)(2) + (−3)(−1)(1)]
Observa que se escribieron las primeras dos columnas a la derecha y se efectuaron seis multiplicaciones en diagonal, tres de arriba hacia abajo y tres de abajo hacia arriba.
= −10 + 15 = 5
D = 5
Sigues un procedimiento parecido para hallar el determinante en x, y, z. Recuerda que cada vez que vas a hallar un determinante, sustituyes la columna de coeficientes de la variable bajo estudio por las constantes. Estudia ahora este proceso aplicado para hallar el determinante en x.
Dx = =
= [(3)(2)(−3) + (1)(4)(4) + (−1)(−3)(−2)] - [(4)(2)(−1) + (−2)(4)(3) + (−3)(−3)(1)]
= [−18 +16 −6] - [−8 - 24 + 9]
= −8 - (−23)
Dx = 15
Dy = =
= [(2)(−3)(−3) + (3)(4)(1) +(−1)(−1)(4)] - [(1)(−3)(−1)+(4)(4)(2)+
(−3)(−1)(3)]
= [18 +12 + 4] - [3 + 32 + 9]
= 34 - 44
Dy = −10
Dz = =
= [(2)(2)(4) + (1)(−3)(1) + (3)(−1)(−2)] - [(1)(2)(3) + (−2)(−3)(2) +
(4)(−1)(1)]
= [16 −3 +6] - [6 + 12 - 4]
= 19 - 14
Dz = 5
En resumen: D = 5 , Dx = 15, Dy = −10, Dz = 5.
Para determinar los valores de las variables llevas a cabo el proceso siguiente:
x = = = 3
y = = = −2
z = = = 1
La solución de este sistema es (3,−2,1). Lo cual significa que las tres rectas representadas por las ecuaciones del sistema se intersecan en este punto.
En las páginas 711 y 712 del texto aparece el ejemplo 2 que puede ser de ayuda para entender los determinantes 3X3.
Una práctica en este momento sería de mucha ayuda, para determinar tu nivel de conocimiento de los determinantes 3×3.
Utiliza la regla de Cramer para resolver cada sistema de ecuaciones:
1. x + y - z = 2
-x +2y +3z = −1
x - 4y - 2z = −7
2. 3x + z = 4
-x +2y + 3z = 6
2x + y + 4z = 8
La teoría general de matrices encuentra una de sus aplicaciones más inmediatas en la resolución de sistemas de ecuaciones lineales con múltiples incógnitas. Aunque posteriormente fue objeto de un extenso desarrollo teórico, este campo de las matemáticas surgió en realidad como un instrumento de cálculo para facilitar las operaciones algebraicas complejas.
Matriz identidad y matriz inversa
Dada una matriz cuadrada A de orden n x n (o, simplemente, n), se define matriz identidad I como la que, conla misma dimensión n, está formada por elementos que son todos nulos salvo los situados en la diagonal principal, cuyo valor es 1. Es decir: A × I = I × A = A.
Para dicha matriz A de orden n, se dice que existe una matriz inversa A-1 también de orden n, cuando el producto de ambas es igual a la matriz identidad: A × A-1 = A-1 × A = I.
Toda matriz que tiene inversa se dice inversible o regular, mientras que cuando carece de inversa se denomina matriz singular.
Para calcular la matriz inversa de una dada, puede recurrirse a la resolución de las ecuaciones que plantearía el producto de matrices A × X = I, siendo los coeficientes de A e I conocidos y los de X correspondientes a las incógnitas. También se puede aplicar el llamado método de reducción o gaussiano, según el siguiente esquema:
Dada la matriz original A = (aij), con i, j = 1, 2, …, n, se forma primero su matriz ampliada (A | I).
Después, se aplican operaciones elementales sobre las filas de la matriz hasta conseguir reducir A a la matriz unidad. Las mismas transformaciones se van haciendo en I. La nueva matriz obtenida es A-1.
Las operaciones elementales que se pueden aplicar a las matrices ampliadas son:
Multiplicación de una fila por un número distinto de cero.
Suma ordenada a los elementos de una fila del múltiplo de los de otra.
Intercambio de filas.
Expresión matricial de un sistema de ecuaciones lineales
Cualquier sistema de ecuaciones lineales puede escribirse siempre en forma matricial de la siguiente forma:
donde A es la matriz de los coeficientes, X la matriz de las incógnitas y B la matriz de los términos independientes.
Así, por ejemplo, el sistema de ecuaciones lineales:
Resolución de un sistema por la matriz inversa
Un procedimiento rápido para la resolución de sistemas de ecuaciones lineales mediante matrices es el llamado método de la matriz inversa. Esta técnica consiste en multiplicar por la izquierda los dos miembros de la expresión matricial del sistema de ecuaciones por la matriz inversa de la de los coeficientes (si existe). De este modo:
Cuando la matriz de los coeficientes no es inversible, el sistema no tiene solución (es incompatible).
En esta sección aprenderemos a calcular el determinante de una matriz de una manera más sencilla, usando operaciones elementales.
TEOREMA 2.2
Sea A una matriz de orden n. Entonces
Si dos filas (o columnas) de una matriz A se intercambian, entonces el signo del determinante cambia.
Si todos los componentes de una fila (o columna) de una matriz A se multiplican por un escalar k, entonces el determinante de la matriz resultante es k veces el determinante de la matriz A.
Si las componentes de una fila (o columna) de una matriz A se multiplican por un escalar k y se le suman a las correspondientes componentes de otra fila (o columna) entonces el determinante no cambia.
En términos de matrices elementales:
a. b. c.
‘’‘ COROLARIO 2.1′’‘
Si una matriz de orden n tiene una fila o una columna que consta solo de ceros, entonces el determinante de la matriz es cero.
DEMOSTRACIÓN.
Sea A una matriz de orden n, como la parte (b) del teorema 2.2 es cierta para k=0, entonces se tiene que el determinante de una matriz que tenga una fila consistiendo sólo de ceros, tiene determinante igual a cero. Para el caso de las columnas, basta proceder de igual forma sobre las filas de , que son las columnas de la matriz.
COROLARIO 2.2
(Determinantes de las matrices elementales de orden n).
a. b. c.
COROLARIO 2.3
Si E una matriz elemental de orden n y A una matriz de orden n, entonces
. DEMOSTRACIÓN.
Sea A una matriz de orden n y E una matriz elemental de orden n. Por el teorema 2.2 y corolario 2.2 se tiene que:
1. Si entonces 2. Si entonces 3. Si entonces
Por inducción matemática, el resultado anterior se puede extender a k matrices elementales
TEOREMA 2.3
Una matriz A de orden n es no singular si y solo si el determinante de A es diferente de cero.
DEMOSTRACIÓN.
Según el teorema 1.13 de la sección 3.2, existen matrices elementales , tales que , donde E es una matriz escalonada reducida y según el corolario 3 de esta sección . Si la matriz A es no singular, entonces E=I y , por tanto . Si la matriz A es singular de orden n, entonces la última fila de E está compuesta de ceros y por tanto , luego .
Pero determinante de es diferente de cero por el corolario 2.2 de esta sección, de donde se concluye que .
TEOREMA 2.4
Si A y B son matrices de orden n, entonces
. DEMOSTRACIÓN.
Si AB es no singular, entonces tanto A como B son no singulares (ejercicio 10 de la sección 15.2) y por el teorema 1.14, literal (d)., se tiene que A es un producto de matrices elementales, es decir, , y aplicando el corolario 2.3 reiteradamente se tiene que . Como , remplazando se obtiene que .
Para una matriz cuadrada A[n,n], el determinante de A, abreviado det(A), es un escalar definido como la suma de n! términos involucrando el producto de n elementos de la matriz, cadauno proveniente exactamente de una fila y columna diferente. Además, cada término de la suma está multiplicado por −1 ó +1 dependiendo del número de permutaciones del orden de las columnas que contenga.
LUDIVINA VALENCIA CORTES
Matriz invertible De Wikipedia, la enciclopedia libre Saltar a navegaci¨®n, b¨
squeda
En matem¨¢ticas, y especialmente en ¨¢lgebra lineal, una matriz cuadrada A de orden n se dice que es invertible, no singular, no degenerada o regular si existe otra matriz cuadrada de orden n, llamada matriz inversa de A y representada como A−1, tal que
AA−1 = A−1A = In, donde In es la matriz identidad de orden n y el producto utilizado es el producto de matrices usual.
Una matriz no invertible se dice que es singular o degenerada. Una matriz es singular si y solo si su determinante es cero.
La inversi¨®n de matrices es el proceso de encontrar la matriz inversa de una matriz dada.
Contenido [ocultar] 1 Propiedades de la matriz inversa 1.1 Demostraci¨®n de la unicidad de la inversa 1.2 Demostraci¨®n del criterio de inversibilidad de las matrices cuadradas 1.2.1 Necesidad 1.2.2Suficiencia 2 M¨¦todos de inversi¨®n de matrices 2.1 Soluci¨®n anal¨ªtica 2.1.1 Inversi¨®n de matrices 2¡Á2 2.1.2 Inversi¨®n de matrices de ¨®rdenes superiores 2.2 M¨¦todos num¨¦ricos 3 Referencias 4 Enlaces externos
Propiedades de la matriz inversa [editar]La inversa de una matriz, si existe, es ¨
nica.
La inversa del producto de dos matrices es el producto de las inversas cambiando el orden:
Si la matriz es invertible, tambi¨¦n lo es su transpuesta, y el inverso de su transpuesta es la transpuesta de su inversa, es decir:
Y, evidentemente:
Una matriz es invertible si y s¨®lo si el determinante de A es distinto de cero. Adem¨¢s la inversa satisface la igualdad:
donde es el determinante de A y es la matriz de adjuntos de A.
Demostraci¨®n de la unicidad de la inversa [editar]Supongamos que B y C son inversas de A
AB = BA = I
AC = CA = I
Multiplicando por C
(BA)C = IC = C
(BA)C = B(AC) = BI = B
De modo que B=C y se prueba que la inversa es ¨
nica.
Demostraci¨®n del criterio de inversibilidad de las matrices cuadradas [editar]Se probar¨¢ la doble implicaci¨®n.
Necesidad [editar]Suponiendo que existe B tal que AB = BA = I. Entonces al aplicar la funci¨®n determinante se obtiene
usando la propiedad det(I) = 1
Por lo tanto, det(A) es distinto de cero.
Suficiencia [editar]Suponiendo que el determinate de A es distinto de cero, sea aij es el elemento ij de la matriz A y sea Aij la matriz A sin la fila i y la columna j (com¨
nmente conocida como j-¨¦simo menor de A). Entonces
Sea , entonces
Esta afirmaci¨®n es v¨¢lida propiedades de los determinantes, pues la parte izquierda de la relaci¨®n nos conduce a una matriz con la columna j igual a la columna k y los dem¨¢s t¨¦rminos iguales a los de A. Entonces
donde ¦Äjk = 1 cuando j = k y ¦Äjk = 0 cuando . Entonces
Es decir que A tiene inversa izquierda
Como , entonces At tambi¨¦n tiene inversa izquierda que es
Entonces
luego, aplicando la transpuesta
Que es lo que se quer¨ªa demostrar
M¨¦todos de inversi¨®n de matrices [editar]
Soluci¨®n anal¨ªtica [editar]
Inversi¨®n de matrices 2¡Á2 [editar]Calcular la matriz inversa en matrices de 2×2 puede ser muy sencillo. Se puede hacer de la siguiente manera: [1]
Esto es posible siempre y cuando ad - bc, el determinante de la matriz, no sea cero.
Inversi¨®n de matrices de ¨®rdenes superiores [editar]Para matrices de ¨®rdenes superiores puede utilizarse la siguiente f¨®rmula:
donde es el determinante de A y es la matriz de adjuntos de A.
M¨¦todos num¨¦ricos [editar]El m¨¦todo de eliminaci¨®n de Gauss-Jordan puede utilizarse para determinar si una determinada matriz es invertible y para encontrar su inversa. Una alternativa es la descomposici¨®n LU, que descompone una matriz dada como producto de dos matrices triangulares, una inferior y otra superior, mucho m¨¢s f¨¢ciles de invertir.
Referencias [editar]¡ü Strang, Gilbert ;(2006). Linear Algebra and Its Applications. Thomson Brooks/Cole, p¨¢gs. p. 46. ISBN 0–03–010567–6.
Informacion proporcionada por Universidad Autonoma de Chihuahua